


Somos una marca reconocida y un fabricante profesional de investigación y desarrollo de máquinas herramienta CNC en China. Se compromete a proporcionar máquinas herramienta profesionales y soluciones de aplicaciones de producción a usuarios globales y proporciona personalización activamente. Tiene más de 650 empleados. Con diferentes modelos y más de 40 productos derivados, nos esforzamos por lograr el objetivo de la visión de "construir una marca famosa en la industria de fabricación de equipos de máquinas herramienta".
Línea de producción de Automation de la serie H de servicio H de 150200 CNC Automation
 Inicio / Productos / Línea de producción de automatización de torno de CNC / Línea de producción de Automation de la serie H de servicio H de 150200 CNC Automation
Inicio / Productos / Línea de producción de automatización de torno de CNC / Línea de producción de Automation de la serie H de servicio H de 150200 CNC Automation Línea de producción de Automation de la serie H de servicio H de 150200 CNC Automation
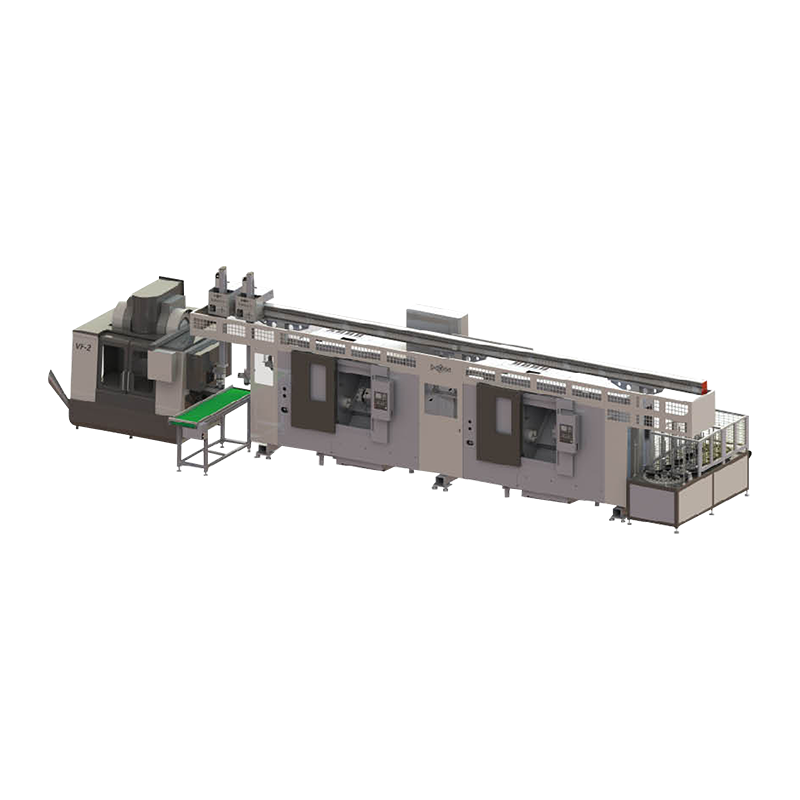
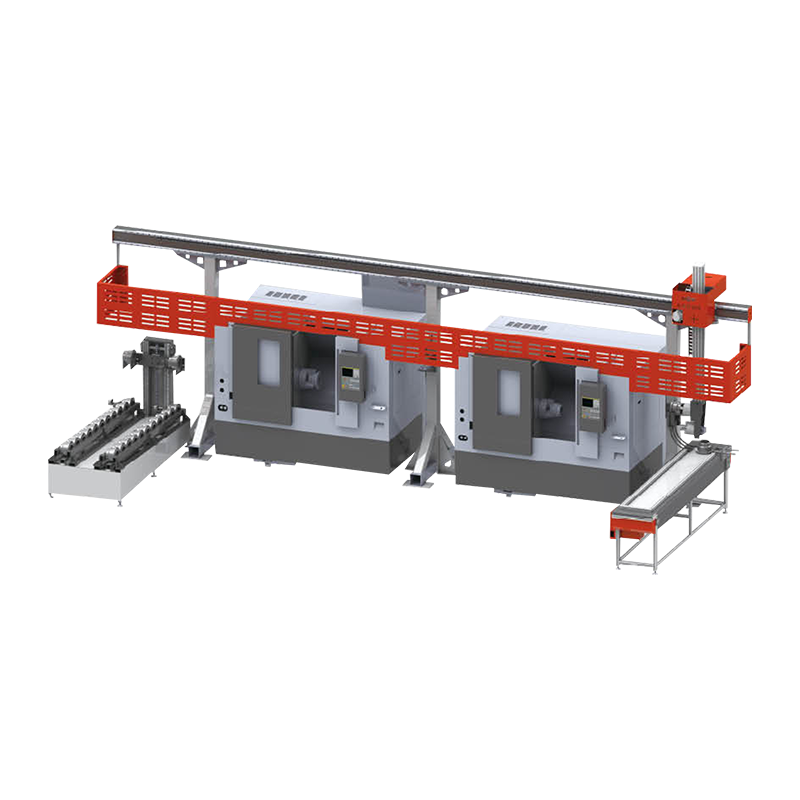
Manipulador de truss externo de dos a tres
-
PARÁMETROS DE DETALLE
-
VISUALIZACIÓN DE VÍDEO
Introducción a la línea de producción de automatización de CNC.
Dos máquinas herramientas de 400k y máquinas de pasatiempos de engranaje están equipadas con manipuladores de truss exteriores de dos a tres (series H de alta resistencia). El sistema de silo de alimentación del lado derecho se utiliza para la carga. Después del procesamiento, las piezas de trabajo se pueden descargar con una cinta transportadora, que también puede evitar que las piezas de trabajo colisionen y las devuelvan al silo. In situ, esperando la selección manual: el tiempo de carga y descarga del robot es de aproximadamente (10-12) s, adecuado para procesar productos con un peso de menos de 10 kg/productos de tamaño pesado: la máquina herramienta incluye una armadura. Las dimensiones del robot: longitud).
| Lista de configuraciones de pinza de la serie H de alta resistencia | ||
| Descripción de la función | Marcas y características | |
| Módulos de componentes funcionales | Viaje de armadura de eje X (viga) : 8600 mm | Módulo lineal de 150x200 |
| Eje z-eje (haz vertical) viaje de armadura : 1200 mm | Módulo lineal 80x80 | |
| Eje x (viga) Velocidad de movimiento: 0-120m/min Eje z (haz vertical) Velocidad de movimiento: 0-120m/min | El rango de la velocidad de movimiento del manipulador | |
| El eje X (haz) y el eje z (haz vertical) están impulsados por servomotors móviles | Delta/Baoyuan (autobús absoluto) | |
| Bastidor/piñón (garantía de 3 años) | Estante helicoidal de alta precisión | |
| Toboganes lineales de truss | Taiwán/Shangyin/Airtac | |
| Piezas de mandíbula de cilindro de una pieza (serie de servicio pesado) | Taiwán/亚德客 Japón/SMC | |
| Reductor de manipulador | Ningbo/cuhk | |
| Sistema de contenedor de alimentación (serie de servicio pesado) | Zhejiang/asiainfo | |
| Cilindro del manipulador Interruptor de detección magnética | Taiwán Qi Like / Domestic Top | |
| Interruptor de proximidad asistido por manipulador | Zhejiang/Devre | |
| Relés de control del manipulador | Francia/Schneider | |
| Válvula solenoide y elemento de control neumático | Taiwán Airtac | |
El sistema de control adopta el último sistema de control especial del manipulador absoluto del bus (expandible del eje 3-6) y una variedad de sistemas de control para elegir, el programa de programación universal del programa de acción manipulador, potente, buen rendimiento, operación fácil y rápida, programación de enseñanza rápida. 33
MANTENERSE EN CONTACTO
Sobre nosotros

Taizhou Eastern CNC Technology Co., Ltd.
Certificado de honor



Noticias
-
Introducción En los últimos dos años, muchos talleres mecánicos pequeños y medianos se han enfrentado a un conjunto de desafíos comunes: dificultad para contratar mano de obra calificada, ...
LEER MÁS -
Descripción general Habla con cualquiera que realmente haya dirigido un torno para trabajar metales para ganarse la vida, y una cosa surge una y otra vez: si se equivoca la máqu...
LEER MÁS -
Resumen Tornos CNC de doble torre y los tornos CNC de doble husillo son dos configuraciones de máquinas herramienta que se analizan juntas con frecuencia en el campo de ...
LEER MÁS -
Resumen A medida que la demanda de fabricación de precisión continúa evolucionando, Tornos del eje Y se están convirtiendo cada vez más en un punto focal para las empresas manuf...
LEER MÁS -
En abril de 2026, la 14ª Exposición de Máquinas Herramienta CNC de China (CCMT2026) concluyó con éxito en Shanghai. El evento reunió a numerosas empresas nacionales e internacionales de renombre...
LEER MÁS
Línea de producción de automatización de torno de CNC Conocimiento de la industria
Cómo comprar máquinas herramienta CNC
-
01
Contáctenos
Todas sus cotizaciones serán respondidas dentro de 2 horas por nuestro soporte de ventas profesional.
-
02
Obtenga una cuota gratis
Utilice piezas y componentes confiables para garantizar calidad del producto.
-
03
Entrega rápida
Puede esperar que su pedido se complete dentro de los 60 días posteriores a la realización del pedido.
-
04
Soporte postventa
Podrás disfrutar durante un año de todos nuestros productos.
-

-

sales@east-cnc.com
-

Área industrial de Shangma, ciudad de Shitang, ciudad de Wenling, Taizhou, Zhejiang, China.
-

enlaces rápidos
Productos
Mensaje
Derechos de autor © Taizhou Eastern CNC Technology Co., Ltd.
